استپر موتور چیست | در این مقاله، مبانی موتورهای استپر را بررسی خواهیم کرد. شما با اصول کار، ساختار، روشهای کنترل، کاربردها و انواع موتورهای استپر، همچنین مزایا و معایب آنها آشنا خواهید شد. در ادامه با آموزشگاه خانه رباتیک ایران همراه باشید.
استپر موتور چیست
استپر موتور چیست؟
یک موتور استپر، یک موتور الکتریکی است که ویژگی اصلی آن این است که شفت آن با انجام مراحل (استپ) بچرخد، یعنی به مقدار مشخصی درجه حرکت کند. این ویژگی به خاطر ساختار داخلی موتور به دست میآید و به ما اجازه میدهد تا موقعیت زاویهای دقیق شفت را تنها با شمارش تعداد مراحل انجام شده، بدون نیاز به حسگر، بدانیم. این ویژگی همچنین آن را برای طیف وسیعی از کاربردها مناسب میسازد.
اصول کار موتور استپر
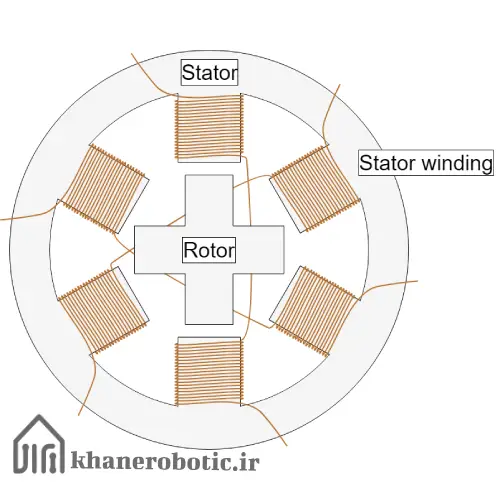
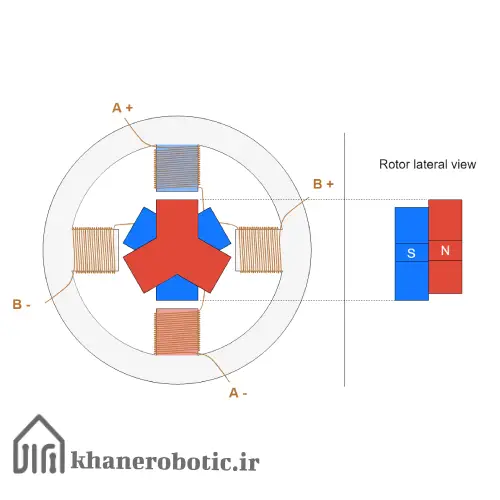
همانند تمام موتورهای الکتریکی، موتورهای استپر دارای یک قسمت ثابت (استاتور) و یک قسمت متحرک (روتور) هستند. در استاتور، دندانههایی وجود دارد که بر روی آنها سیمپیچیها قرار دارند، در حالی که روتور یا یک آهنربای دائمی است یا هسته آهنی با reluctance متغیر. ما بعداً به بررسی عمیقتری از ساختارهای متفاوت روتور خواهیم پرداخت. شکل زیر نمایی از مقطع موتور را نشان میدهد که در آن روتور یک هسته آهنی با reluctance متغیر است.
اصول کار موتور استپر
اصل کار پایهای موتور استپر به صورت زیر است:
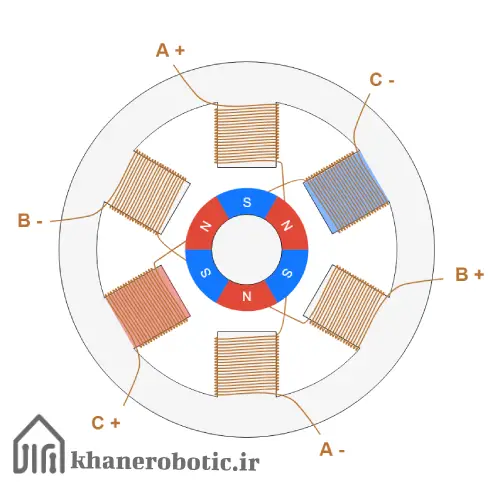
با تأمین انرژی به یکی یا چند فاز استاتور، یک میدان مغناطیسی توسط جریانی که در سیمپیچی جریان دارد، تولید میشود و روتور با این میدان همراستا میشود. با تأمین فازهای مختلف به ترتیب، روتور میتواند به مقدار مشخصی بچرخد تا به موقعیت نهایی مورد نظر برسد.
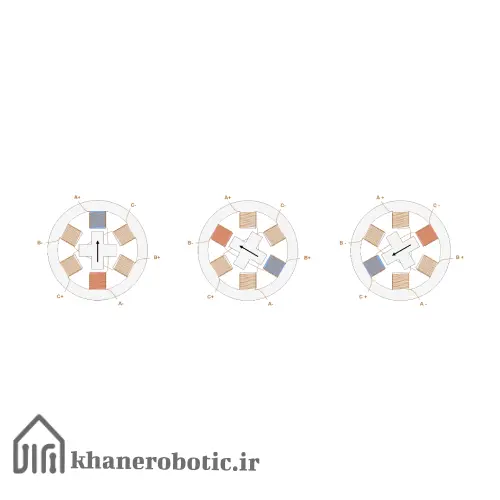
شکل زیر نمایی از اصل کار را نشان میدهد. در ابتدا، سیمپیچی A تأمین انرژی میشود و روتور با میدان مغناطیسی که تولید میکند همراستا میشود. وقتی سیمپیچی B تأمین انرژی میشود، روتور به اندازه ۶۰ درجه در جهت عقربههای ساعت میچرخد تا با میدان مغناطیسی جدید همراستا شود. همین اتفاق زمانی که سیمپیچی C تأمین انرژی میشود نیز میافتد. در تصاویر، رنگهای دندانههای استاتور جهت میدان مغناطیسی تولید شده توسط سیمپیچی استاتور را نشان میدهند.
استپر موتور
انواع موتورهای استپر
عملکرد یک موتور استپر — از نظر دقت (یا اندازه استپ)، سرعت و گشتاور — تحت تأثیر جزئیات ساختاری قرار دارد که در عین حال ممکن است بر نحوه کنترل موتور نیز تأثیر بگذارد. در واقع، همه موتورهای استپر دارای ساختار داخلی یکسانی نیستند، زیرا پیکربندیهای مختلفی برای روتور و استاتور وجود دارد.
روتور
برای یک موتور استپر، بهطور کلی سه نوع روتور وجود دارد:
روتور آهنربای دائمی:
روتور یک آهنربای دائمی است که با میدان مغناطیسی تولید شده توسط مدار استاتور همراستا میشود. این راهحل گشتاور خوبی را تضمین میکند و همچنین گشتاور نگهدارنده (detent torque) دارد. این به این معنی است که موتور حتی اگر بهطور قوی مقاومت نکند، در برابر تغییر موقعیت مقاوم خواهد بود، صرفنظر از اینکه آیا یک سیمپیچی تأمین انرژی شده است یا خیر. معایب این راهحل این است که سرعت و دقت کمتری نسبت به سایر انواع دارد.
روتور reluctance متغیر:
روتور از یک هسته آهنی ساخته شده و دارای شکلی خاص است که به آن اجازه میدهد با میدان مغناطیسی همراستا شود (به شکلهای ۱ و ۲ مراجعه کنید). با این راهحل، رسیدن به سرعت و دقت بالاتر آسانتر است، اما گشتاور تولید شده معمولاً کمتر است و گشتاور نگهدارنده ندارد.
روتور هیبرید:
این نوع روتور دارای ساختاری خاص است و ترکیبی از نسخههای آهنربای دائمی و reluctance متغیر میباشد. روتور دارای دو کلاهک با دندانههای متناوب است و به صورت محوری مغناطیسی شده است. این پیکربندی به موتور اجازه میدهد تا از مزایای هر دو نسخه آهنربای دائمی و reluctance متغیر بهرهمند شود، بهویژه دقت، سرعت و گشتاور بالا. این عملکرد بالاتر نیاز به ساختاری پیچیدهتر و در نتیجه هزینه بالاتری دارد. شکل قبل یک مثال سادهشده از ساختار این موتور را نشان میدهد. زمانی که سیمپیچی A تأمین انرژی میشود، یک دندانه از کلاهک مغناطیسی N با دندانه مغناطیسی S استاتور همراستا میشود. در عین حال، به دلیل ساختار روتور، دندانه مغناطیسی S با دندانه مغناطیسی N استاتور همراستا میشود. موتورهای واقعی دارای ساختاری پیچیدهتر هستند و تعداد دندانههای بیشتری نسبت به آنچه در تصویر نشان داده شده دارند، هرچند اصل کار موتور استپر یکسان است. تعداد بالای دندانهها به موتور اجازه میدهد تا اندازه استپ کوچکی تا ۰.۹ درجه را بهدست آورد.
روتور هیبرید
استاتور
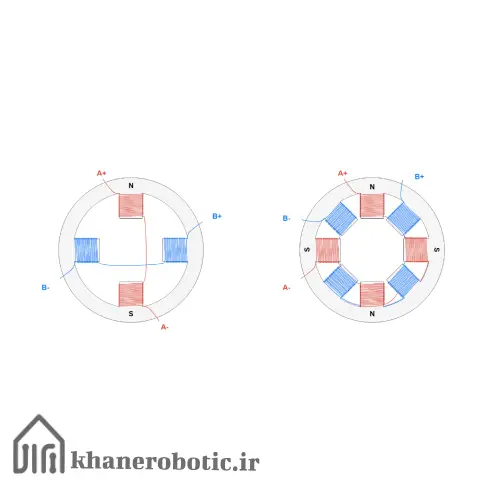
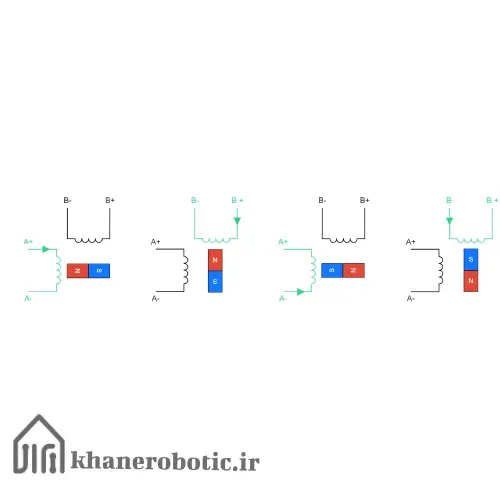
استاتور قسمتی از موتور است که مسئول ایجاد میدان مغناطیسی است که روتور با آن همراستا میشود. ویژگیهای اصلی مدار استاتور شامل تعداد فازها و جفتهای قطبی، همچنین پیکربندی سیمپیچی است. تعداد فازها بیانگر تعداد سیمپیچیهای مستقل است، در حالی که تعداد جفتهای قطبی نشان میدهد که هر فاز چند جفت دندان اصلی را اشغال کرده است. موتورهای استپر دو فازه معمولاً بیشتر مورد استفاده قرار میگیرند، در حالی که موتورهای سه فازه و پنج فازه کمتر رایج هستند (به شکلهای زیر مراجعه کنید).

استاتور
استاتور
کنترل موتور استپر
ما قبلاً مشاهده کردیم که سیمپیچیهای موتور باید به ترتیب خاصی تأمین انرژی شوند تا میدان مغناطیسی ایجاد شود که روتور با آن همراستا شود. چندین دستگاه برای تأمین ولتاژ مورد نیاز به سیمپیچیها استفاده میشود و به این ترتیب اجازه میدهد تا موتور به درستی عمل کند. از دستگاههایی که به موتور نزدیکتر هستند، داریم:
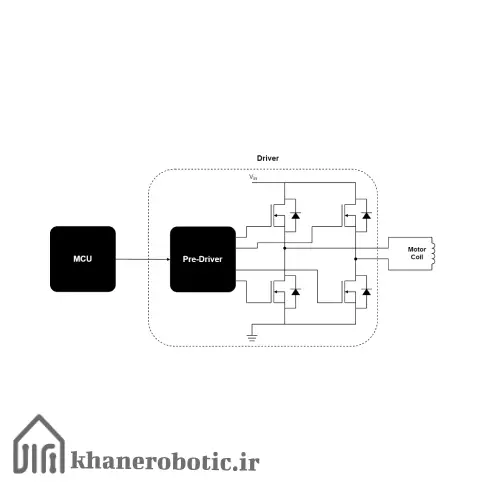
– پل ترانزیستوری: این دستگاه بهطور فیزیکی کنترلکننده اتصال الکتریکی سیمپیچیهای موتور است. ترانزیستورها را میتوان بهعنوان قطعکنندههای الکتریکی کنترلشده در نظر گرفت که وقتی بسته میشوند، اتصال یک سیمپیچی به منبع الکتریکی را امکانپذیر کرده و در نتیجه جریان در سیمپیچی جاری میشود. برای هر فاز موتور به یک پل ترانزیستوری نیاز است.
– پیشراننده: این دستگاه کنترلکننده فعالسازی ترانزیستورها است که ولتاژ و جریان مورد نیاز را تأمین میکند و به نوبه خود توسط یک واحد میکروکنترلر (MCU) کنترل میشود.
– MCU (واحد میکروکنترلر): این واحد معمولاً توسط کاربر موتور برنامهریزی میشود و سیگنالهای خاصی را برای پیشراننده تولید میکند تا رفتار مورد نظر موتور حاصل شود.
شکل زیر نمایی ساده از یک طرح کنترل موتور استپر را نشان میدهد. پیشراننده و پل ترانزیستوری ممکن است در یک دستگاه واحد که به آن درایور گفته میشود، گنجانده شوند.
طرح کنترل موتور استپر
انواع درایور موتور استپر
در بازار درایورهای مختلفی برای موتورهای استپر موجود است که ویژگیهای متفاوتی برای کاربردهای خاص را نشان میدهند. مهمترین ویژگیها شامل رابط ورودی هستند. رایجترین گزینهها عبارتند از:
– Step/Direction: با ارسال یک پالس به پین Step، درایور خروجی خود را تغییر میدهد بهطوریکه موتور یک استپ انجام دهد، که جهت آن توسط سطح موجود در پین Direction تعیین میشود.
– Phase/Enable: برای هر فاز سیمپیچی استاتور، Phase جهت جریان را تعیین میکند و در صورتی که فاز تأمین انرژی شود، Enable را فعال میکند.
– PWM: بهطور مستقیم سیگنالهای دروازهای FETهای سمت پایین و سمت بالا را کنترل میکند.
ویژگی مهم دیگر یک درایور موتور استپر این است که آیا فقط قادر به کنترل ولتاژ در سیمپیچی است یا همچنین جریان جاری از آن را کنترل میکند:
– کنترل ولتاژ: در این حالت، درایور فقط ولتاژ موجود در سیمپیچی را تنظیم میکند. گشتاور تولید شده و سرعتی که مراحل اجرا میشوند تنها به ویژگیهای موتور و بار بستگی دارد.
– درایورهای کنترل جریان: این درایورها پیشرفتهتر هستند، زیرا جریان جاری در سیمپیچی فعال را تنظیم میکنند تا کنترل بهتری بر گشتاور تولید شده و در نتیجه رفتار دینامیکی کل سیستم داشته باشند.
موتورهای یونیقطبی/دو قطبی
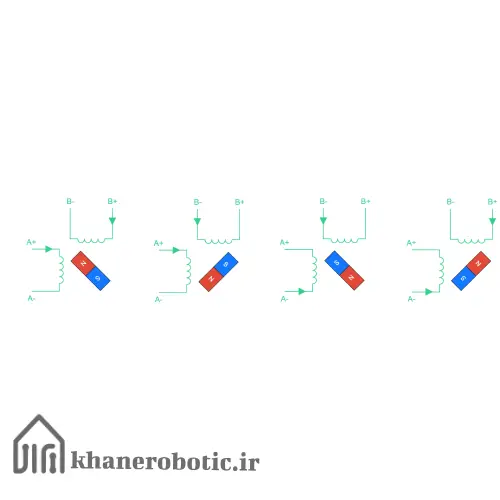
ویژگی دیگر موتور که بر کنترل نیز تأثیر میگذارد، ترتیب سیمپیچیهای استاتور است که تعیین میکند چگونه جهت جریان تغییر میکند. برای دستیابی به حرکت روتور، نه تنها باید سیمپیچیها تأمین انرژی شوند، بلکه باید جهت جریان نیز کنترل شود که جهت میدان مغناطیسی تولید شده توسط خود سیمپیچی را تعیین میکند (به شکل زیر مراجعه کنید). در موتورهای استپر، مسئله کنترل جهت جریان با دو رویکرد مختلف حل میشود.
تصویر ۸
در موتورهای استپر یونیقطبی، یکی از سیمها به نقطه مرکزی سیمپیچی متصل است (به شکل زیر مراجعه کنید). این امکان را فراهم میکند که جهت جریان را با استفاده از مدار و اجزای نسبتاً ساده کنترل کنیم. سیم مرکزی (AM) به ولتاژ ورودی VIN متصل است (به شکل قبل مراجعه کنید). اگر MOSFET 1 فعال باشد، جریان از AM به A+ جریان مییابد. اگر MOSFET 2 فعال باشد، جریان از AM به A- جریان مییابد و میدان مغناطیسی در جهت مخالف تولید میشود. همانطور که اشاره شد، این رویکرد اجازه میدهد که یک مدار رانش سادهتر ایجاد شود (تنها به دو نیمههادی نیاز است)، اما معایب آن این است که تنها نیمی از مس استفاده شده در موتور در یک زمان استفاده میشود. این به این معنی است که برای همان جریانی که در سیمپیچی جاری است، میدان مغناطیسی نصف شدت دارد نسبت به حالتی که تمام مس استفاده میشد. علاوه بر این، ساخت این موتورها دشوارتر است زیرا نیاز به ورودیهای بیشتری برای اتصال سیمها وجود دارد.
استپر موتور چیست؟ | آموزشگاه خانه رباتیک ایران

استپر موتور چیست
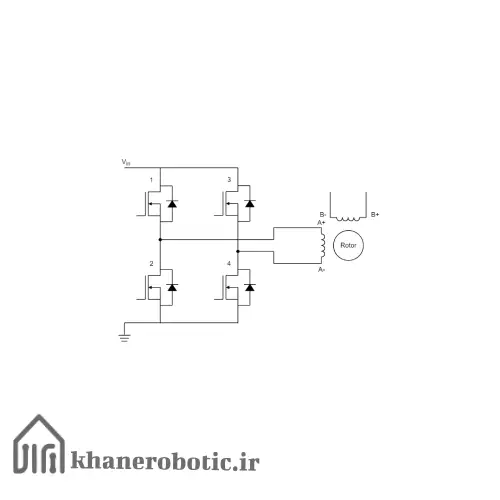
در موتورهای استپر دو قطبی، هر سیمپیچی تنها دو سر دارد و برای کنترل جهت جریان لازم است از یک H-bridge استفاده شود (به شکل زیر مراجعه کنید). همانطور که در شکل ۸ نشان داده شده است، اگر MOSFETهای ۱ و ۴ فعال باشند، جریان از A+ به A- جریان مییابد، در حالی که اگر MOSFETهای ۲ و ۳ فعال باشند، جریان از A- به A+ جریان مییابد و میدان مغناطیسی در جهت مخالف تولید میشود. این راهحل نیاز به یک مدار رانش پیچیدهتر دارد، اما به موتور اجازه میدهد تا حداکثر گشتاور را برای مقدار مس استفاده شده بهدست آورد.
استپر موتور چیست؟ | آشنایی کامل با استپر موتور
استپر موتور چیست
با پیشرفت فناوری، مزایای موتورهای یونیقطبی کمتر مرتبط میشوند و در حال حاضر موتورهای دو قطبی محبوبترین هستند.
تکنیکهای رانش موتور استپر
چهار تکنیک مختلف برای رانش موتور استپر وجود دارد:
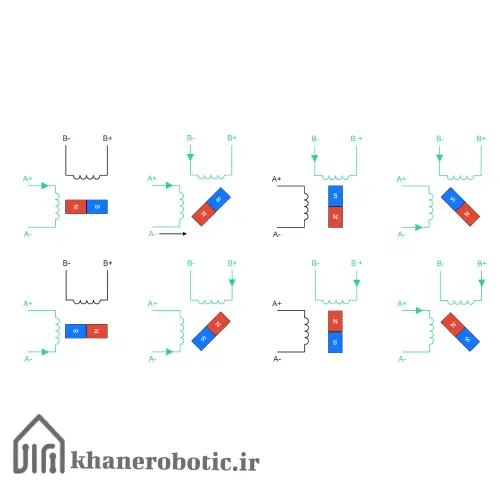
در حالت موجی، تنها یک فاز در هر بار تأمین انرژی میشود (به شکل زیر مراجعه کنید). برای سادگی، میگوییم که جریان در جهت مثبت در حال جریان است اگر از سر + به سر – یک فاز (بهعنوان مثال، از A+ به A-) حرکت کند؛ در غیر این صورت، جهت منفی است. از سمت چپ شروع میکنیم، جریان تنها در فاز A در جهت مثبت در حال جریان است و روتور، که با یک آهنربا نمایش داده شده، با میدان مغناطیسی تولید شده توسط آن همراستا است. در مرحله بعد، جریان تنها در فاز B در جهت مثبت جاری میشود و روتور ۹۰ درجه به سمت عقربههای ساعت میچرخد تا با میدان مغناطیسی تولید شده توسط فاز B همراستا شود. بعداً، فاز A دوباره تأمین انرژی میشود، اما جریان در جهت منفی جاری میشود و روتور دوباره ۹۰ درجه میچرخد. در آخرین مرحله، جریان بهصورت منفی در فاز B جاری میشود و روتور دوباره ۹۰ درجه میچرخد.
استپر موتور چیست
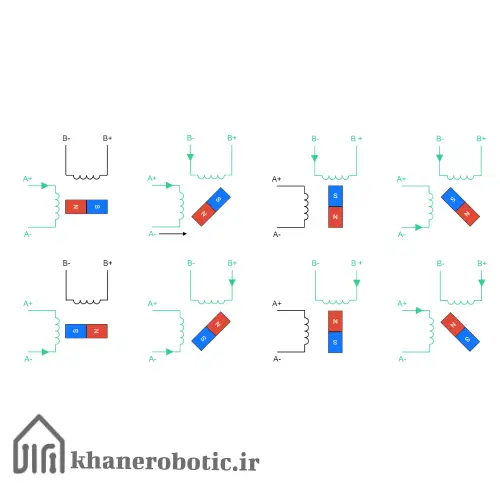
در حالت فول استپ، دو فاز همیشه بهطور همزمان تأمین انرژی میشوند. شکل زیر مراحل مختلف این حالت رانش را نشان میدهد. مراحل مشابه مراحل حالت موجی هستند، اما تفاوت مهم این است که در این حالت، موتور قادر به تولید گشتاور بالاتری است زیرا جریان بیشتری در موتور جاری میشود و میدان مغناطیسی قویتری تولید میشود.
استپر موتور چیست
حالت نیمهاستپ ترکیبی از حالتهای موجی و فولاستپ است (به شکل قبل مراجعه کنید). استفاده از این ترکیب امکان کاهش اندازه گام را به نصف میدهد (در این مورد، ۴۵ درجه به جای ۹۰ درجه). تنها عیب این است که گشتاور تولید شده توسط موتور ثابت نیست، زیرا زمانی که هر دو فاز تأمین انرژی میشوند، گشتاور بالاتر است و زمانی که تنها یک فاز فعال است، گشتاور ضعیفتر میشود.
استپر موتور چیست
میکرو استپینگ را میتوان بهعنوان یک بهبود بیشتر از حالت نیمهاستپ در نظر گرفت، زیرا این امکان را فراهم میکند که اندازه گام را حتی بیشتر کاهش داده و گشتاور خروجی ثابتی داشته باشیم. این امر با کنترل شدت جریانی که در هر فاز جاری است، محقق میشود. استفاده از این حالت نیاز به یک درایور موتور پیچیدهتر در مقایسه با راهحلهای قبلی دارد.
شکل بعدی نشان میدهد که میکرو استپینگ چگونه کار میکند. اگر IMAX حداکثر جریانی باشد که میتواند در یک فاز جاری شود، از سمت چپ شروع میکنیم، در شکل اول IA = IMAX و IB = 0 است. در مرحله بعد، جریانها کنترل میشوند تا IA = 0.92 × IMAX و IB = 0.38 × IMAX حاصل شود که میدان مغناطیسی را به اندازه ۲۲.۵ درجه به سمت عقربههای ساعت نسبت به میدان قبلی میچرخاند. این مرحله با مقادیر جریان مختلف تکرار میشود تا به موقعیتهای ۴۵، ۶۷.۵ و ۹۰ درجه برسد. این امکان را فراهم میکند که اندازه گام را به نصف حالت نیمهاستپ کاهش دهیم؛ اما میتوان حتی بیشتر پیش رفت.
استفاده از میکرو استپینگ به رسیدن به دقت موقعیتی بسیار بالا کمک میکند، اما این مزیت به هزینه یک دستگاه پیچیدهتر برای کنترل موتور و گشتاور کمتری که با هر گام تولید میشود، میانجامد. در واقع، گشتاور متناسب با سینوس زاویه بین میدان مغناطیسی استاتور و میدان مغناطیسی روتور است؛ بنابراین، زمانی که اندازه گامها کوچکتر است، گشتاور نیز کوچکتر میشود. این ممکن است منجر به از دست رفتن برخی گامها شود، به این معنی که موقعیت روتور تغییر نمیکند حتی اگر جریان در سیمپیچی استاتور تغییر کند.
استپر موتور چیست
مزایا و معایب موتورهای استپر
حال که اصول کار موتورهای استپر را درک کردهایم، مفید است که مزایا و معایب آنها را در مقایسه با سایر انواع موتورها خلاصه کنیم.
مزایا استپر موتور
– به دلیل ساختار داخلی خود، موتورهای استپر نیازی به حسگر برای شناسایی موقعیت موتور ندارند. از آنجا که موتور با انجام “گامها” حرکت میکند، با شمارش این گامها میتوان موقعیت موتور را در یک زمان معین بهدست آورد.
– علاوه بر این، کنترل موتور استپر نسبتاً ساده است. موتور به یک درایور نیاز دارد، اما نیازی به محاسبات پیچیده یا تنظیمات برای عملکرد صحیح ندارد. بهطور کلی، تلاش کنترل در مقایسه با سایر موتورها کمتر است. با استفاده از میکرو استپینگ، میتوان به دقت موقعیتی بالا، تا حدود ۰.۰۰۷ درجه دست یافت.
– موتورهای استپر گشتاور خوبی در سرعتهای پایین ارائه میدهند، برای نگهداشتن موقعیت عالی هستند و معمولاً عمر طولانیتری دارند.
معایب استپر موتور
– اگر گشتاور بار بیش از حد بالا باشد، ممکن است یک گام را از دست بدهند. این مسئله بهطور منفی بر کنترل تأثیر میگذارد، زیرا هیچ راهی برای دانستن موقعیت واقعی موتور وجود ندارد. استفاده از میکرو استپینگ احتمال بروز این مشکل را در موتورهای استپر افزایش میدهد.
– این موتورها همیشه حداکثر جریان را حتی زمانی که در حالت سکون هستند مصرف میکنند، که باعث کاهش کارایی و احتمال گرم شدن بیش از حد میشود.
– موتورهای استپر گشتاور کمی دارند و در سرعتهای بالا صدای زیادی تولید میکنند.
– در نهایت، موتورهای استپر دارای چگالی توان پایین و نسبت گشتاور به اینرسی کمی هستند.
بهطور خلاصه، موتورهای استپر زمانی مناسب هستند که به یک راهحل ارزان و آسان برای کنترل نیاز دارید و کارایی و گشتاور بالا در سرعتهای بالا ضروری نیست.
برای یادگیری بیشتر در مورد نحوه انتخاب نوع مناسب موتور برای پروژهتان و تفاوتهای بین موتورهای استپر، با برس و بدون برس، میتوانید اینجا کلیک کنید.
کاربردها و استفادههای موتورهای استپر
به دلیل ویژگیهایشان، موتورهای استپر در بسیاری از کاربردها که نیاز به کنترل موقعیت ساده و توانایی نگهداشتن موقعیت دارند، استفاده میشوند.
” لطفا سوالات خود را با ذکر عنوان مقاله ارسال کنید. تیم خانه رباتیک ایران پاسخگوی شماست. “
آماده سازی فرم
لطفا صبر کنید
فرم ساز آسان
شعبه ساری: خیابان مهدیه، نبش بهمن شرقی
شعبه بابل: پل کارگر به سمت کشوری، روبروی ماکروویو، جنب فروشگاه جانبو
شعبه قائم شهر: خیابان ساری، بین یاس ۲۰ و ۲۲