معرفی انواع چرخ در رباتیک | چرخ در رباتیک به عنوان یکی از انواع مکانیزمهای حرکتی استفاده میشود که به رباتها امکان جابجایی و حرکت در محیط را میدهد. ایجاد یک پروژه رباتیک موفق نیازمند برنامهریزی دقیق است. علاوه بر ایجاد نمودارها، مدارها و سایر نقشههای ساختاری، باید تحقیق کنید که کدام قطعات برای پروژهتان مناسبتر هستند. به عنوان مثال، اگر قصد دارید یک ربات متحرک چرخدار (WMR) مانند ربات دنبالکننده خط بسازید، باید اطمینان حاصل کنید که دارای چرخهای مناسب برای ربات است. راهنمای زیر تمام انواع چرخهای ربات را توصیف خواهد کرد. در پایان این راهنما، باید بتوانید بفهمید کدام چرخها برای پروژه شما بهترین هستند. در ادامه با آموزشگاه خانه رباتیک ایران همراه باشید.
انواع چرخهای ربات چیست؟

معرفی انواع چرخ در رباتیک
انتخاب نوع چرخ مناسب ضروری است. این انتخاب بر قابلیت حرکت و درجات حرکت ربات شما تأثیر میگذارد. انواع چرخهای ربات که در دسترس شما هستند عبارتند از:
چرخهای استاندارد
چرخهای استاندارد (یا چرخهای ثابت) رایجترین چرخهای ربات هستند. آنها چرخهای دوجهتی سادهای هستند که میتوانند به جلو یا عقب حرکت کنند. بنابراین، میتوانید از آنها بهعنوان چرخهای محرک یا چرخهای دلخواه استفاده کنید.
این چرخها در اندازهها و نوعهای مختلفی موجود هستند. علاوه بر این، آنها دارای انتخاب وسیعی از آجهای لاستیکی مناسب برای سطوح مختلف هستند. این ویژگی به شما اجازه میدهد که از آنها در داخل و خارج از ساختمان استفاده کنید. همانطور که نام دیگر آنها (چرخهای ثابت) نشان میدهد، شما باید آنها را به بدنه ربات خود متصل کنید (معمولاً با استفاده از مرکز آن).
با این حال، دو نوع چرخ غلتکی سنتی وجود دارد:
– چرخهای مرکزدار: محور عمودی، محور چرخش یا محور چرخ در وسط چرخ قرار دارد.
– چرخهای خارج از مرکز: محور عمودی کمی خارج از مرکز قرار دارد. شما میتوانید با اضافه کردن یک مفصل چرخشی، انعطافپذیری بیشتری به طراحی اضافه کنید.
چرخهای مکانوم (Mecanum Wheels)
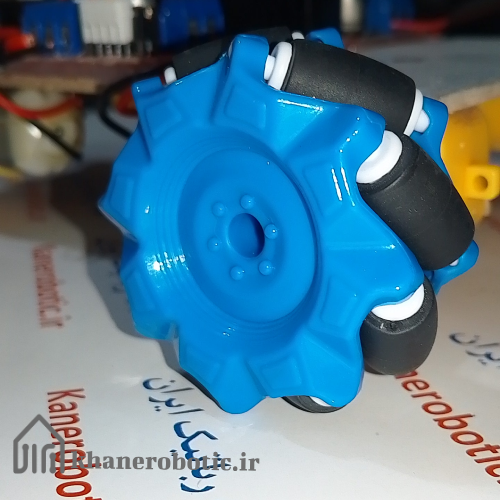
چرخهای مکانوم
چرخهای مکانوم چندجهته هستند. مانند چرخهای استاندارد، میتوانید از آنها بهعنوان چرخهای محرک یا چرخهای دلخواه استفاده کنید. معمولاً آنها از چندین غلتک تشکیل شدهاند که معمولاً در زاویه ۴۵ درجه قرار دارند. علاوه بر این، مهندسان به انواع مختلفی از چرخهای چپ و راست برای طراحیهای خود نیاز دارند. چرخهای مکانوم کاربردهای انعطافپذیری دارند. به همین دلیل، میتوانید از آنها برای طراحیهای داخلی و خارجی استفاده کنید.
چرخهای Omni

چرخهای Omni
چرخهای Omni دارای غلتکهایی هستند که در زاویه ۹۰ درجه قرار دارند و این امکان را به آنها میدهد که چهار بعد آزادی داشته باشند. آنها میتوانند به جلو، عقب، چپ و راست حرکت کنند. این انعطافپذیری به شما اجازه میدهد که از آنها بهعنوان چرخهای محرک یا چرخهای دلخواه استفاده کنید. با این حال، آنها فقط برای استفاده در محیط داخلی مناسب هستند.
چرخهای خورشیدی (Solar Wheels)

چرخهای خورشیدی (Solar Wheels)
چرخهایی که میتوانند در جهات مخلف حرکت کنند.
چرخهای هرزگرد (Caster Wheels)
چرخهای هرزگرد (Caster Wheels)
این چرخها دارای یک محور چرخشی اضافی هستند که به آنها اجازه میدهد به هر جهتی بچرخند. چرخهای هرزگرد معمولاً برای ایجاد تعادل و پشتیبانی در رباتها استفاده میشوند و به ربات کمک میکنند تا به راحتی دور بزند و حرکت کند. این چرخها معمولاً به صورت جفت یا بیشتر در کنار چرخهای اصلی استفاده میشوند.
چرخهای فنری (Spring Wheels)
این چرخها دارای سیستم تعلیق فنری هستند که به آنها اجازه میدهد تا ضربهها و لرزشها را جذب کنند. این نوع چرخها برای رباتهایی که در محیطهای ناهموار حرکت میکنند، مناسب هستند.
چرخهای خزنده (Track Wheels)

چرخهای فنری (Spring Wheels)
این چرخها به صورت زنجیری یا تسمهای هستند و برای حرکت در سطوح ناهموار و دشوار مناسباند. تانکها و رباتهای نظامی اغلب از این نوع چرخ استفاده میکنند.
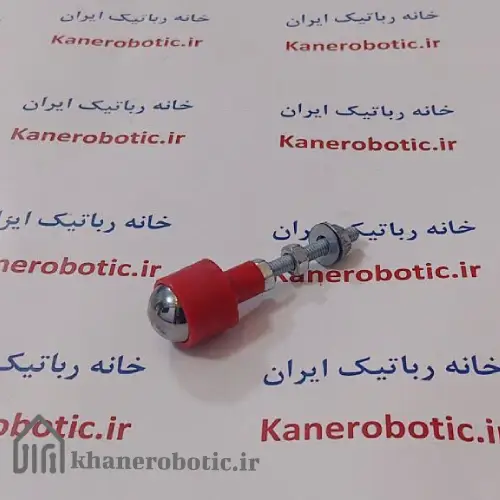
چرخهای کروی (Spherical Wheels)
این چرخها به شکل کره هستند و امکان حرکت در تمام جهات را فراهم میکنند. معمولاً در رباتهایی که نیاز به مانور بسیار بالا دارند، استفاده میشوند.
چرخهای جهتپذیر (Orientable wheels)
این چرخها روی یک دوشاخه (fork) نصب میشوند که چرخ را در جای خود نگه میدارد. چرخهای جهتپذیر معمولاً برای ایجاد تعادل در ربات استفاده میشوند و به ندرت برای به حرکت درآوردن ربات به کار میروند. دو نوع چرخ جهتپذیر وجود دارد: چرخهای جهتپذیر مرکزی (Centered) و چرخهای جهتپذیر غیرمرکزی (Off-centered):
چرخ جهتپذیر مرکزی
در این نوع طراحی، محور عمودی چرخ از مرکز آن عبور میکند. طراحی آن ساده است و تنها به چند پیچ برای اتصال چرخ به بدنه ربات نیاز دارید.
چرخهای غیرمرکزی (که به نام چرخهای کاستور هم شناخته میشوند.)
کمی متفاوت هستند. محور عمودی از مرکز چرخ عبور نمیکند، بلکه کمی خارج از مرکز قرار دارد. برخی از طرحها شامل یک مفصل گردان بین چرخ و دوشاخه هستند که به آن اجازه میدهد آزادانه با ۳۶۰ درجه آزادی بچرخد. یکی از بزرگترین معایب این چرخهای گردان، پدیده “فلاتر” (flutter) است. فلاتر زمانی رخ میدهد که چرخ با زمین تماس نداشته باشد و آزادانه در هر جهتی بچرخد. پس از تماس با زمین، آنها میتوانند در هر جهتی قرار بگیرند و در هر جهتی حرکت کنند.
مشخصات دیگر چرخهای ربات که باید مدنظر قرار دهید
معرفی انواع چرخ در رباتیک
چند نکته وجود دارد که علاقهمندان، طراحان و مهندسان باید هنگام انتخاب چرخهای ربات مورد توجه قرار دهند. این بخش از راهنما به بررسی آنها میپردازد.
اندازه چرخ (قطر)
اندازه چرخ اولین پارامتری است که باید هنگام انتخاب چرخ ربات در نظر بگیرید. در حالی که میتواند بر عناصر مختلف طراحی مرتبط با پروژه شما تأثیر بگذارد، دو عامل مهم آن سرعت و فاصله از زمین است. رباتهای داخلی معمولاً به فاصله کمتری از زمین نسبت به رباتهای خارجی نیاز دارند.
عرض چرخ
عرض چرخ شما تعیینکننده مقدار کشش آن خواهد بود. علاوه بر این، بر فرمانپذیری (برای فرمانپذیری لغزشی) و حداکثر باری که میتواند تحمل کند تأثیر میگذارد. هر چه چرخ ربات عریضتر باشد، میتواند جرم بیشتری را پشتیبانی کند زیرا تماس بیشتری با زمین خواهد داشت.

معرفی انواع چرخ در رباتیک
آج چرخ
آج چرخ (یا لاستیک) تعیین میکند که ربات چه سطوحی را میتواند طی کند. آجهای نرم یا لاستیکی شده کشش و چسبندگی بیشتری را ارائه میدهند. بنابراین، آنها برای سطوح صاف ساده مناسبتر هستند. برعکس، مسیرهای سختتر، ضخیمتر و طرحدار برای کاربردهای فضای باز مناسبتر هستند.
نصب
یکی از اولین مواردی که باید هنگام انتخاب چرخ ربات برای پروژه خود در نظر بگیرید، گزینه های نصب است. پایه های محوری ساده برای علاقه مندان ساده ترین هستند. با این حال، اگر رباتی را برای استفاده در فضای باز بسازید، ممکن است به تعلیق نیاز داشته باشید.
فرمان
در مرحله بعد، طراحان باید نوع فرمانی را که می خواهند در طرح های خود لحاظ کنند، در نظر بگیرند. فرمان اسکید برای طراحی های ساده بهترین است. ربات ها با تغییر سرعت چرخ به فرمان لغزشی دست می یابند. بنابراین، در انتخاب این نوع فرمان، توجه به عرض چرخ های خود ضروری است.
هرچه عرض چرخ بیشتر باشد، دقت فرمان لغزش شما بیشتر می شود. با این حال، ممکن است تصمیم بگیرید از فرمان Rack and Pinion برای طراحی های پیشرفته تر خود استفاده کنید.

معرفی انواع چرخ در رباتیک
این تنوع در چرخها به مهندسان امکان میدهد تا بهترین گزینه را بر اساس نیازهای خاص ربات طراحی و استفاده کنند.
بهترین چرخ برای ربات شما، وابسته به نوع طراحی و کاربرد ربات خواهد بود. چرخ های ربات ثابت به راحتی به موتور متصل میشوند و میتوان از آنها به عنوان چرخ پیشران یا کنترل کننده بهره برد. اما چرخهایی که قابلیت تغییر جهت دارند یا به صورت کروی هستند، برای حفظ تعادل ربات به کار برده میشوند (بهخصوص هنگامی که دو چرخ پیشران در اختیار دارید و تنها به یک چرخ برای حفظ تعادل نیاز است که به آن چرخ کمکی (Auxiliary Wheel) گفته میشود). چرخ های ربات سوئدی برای کنترل و پیش بردن ربات کاملاً مناسب هستند اما نقاط ضعف منحصر به فرد خودش را دارد اول اینکه این نوع چرخها گران قیمت تر از مدل ثابت هستند و کارایی آنها به دلیل اینکه تمام چرخهای کوچک در جهت حرکت ربات نمی چرخند پایین است، دوماً این چرخها مناسب چرخش درجا نیستند و در صورت چرخش درجا امکان لیز خوردن ربات وجود دارد.
یک ربات برای حفظ تعادل نیاز دارد که اتصال مناسبی با زمین داشته باشد و این اتصال مناسب تا حد زیادی وابسته به نوع چرخ و زمینی که ربات میخواهد روی آن حرکت کند، می باشد. به عنوان مثال اگر قرار است ربات روی پارکت یا سرامیک حرکت کند چرخهای پلاستیکی بهترین عملکرد را خواهند داشت از آن جایی که پارکت و سرامیک فوقالعاده صاف هستند چرخ پلاستیکی به ربات کمک میکند که روی این سطوح لیز نخورد اما اگر ربات بخواهد روی زمینهای گلی یا ماسه ای حرکت کند باید از چرخ های عاج دار استفاده شود تا ربات قادر باشد به راحتی گل و لای و ماسه را کنار بزند و به حرکت خود ادامه دهد، اما استفاده از چرخهای عاج دار روی زمین صاف تنها ناحیه تماس چرخ با زمین را کاهش میدهد و ربات را نامتعادل تر میکند در ضمن استفاده از چرخ صاف روی زمین ماسه ای و گلی باعث میشود چرخ بدون اینکه قادر باشد گل و ماسه را کنار بزند در جای خود بیهوده بچرخد.
نتیجه گیری
هنگامی که نحوه ساخت مدارهای کنترل از راه دور را یاد گرفتید، به نوع مناسب چرخ ها برای متحرک سازی آنها نیاز خواهید داشت. رباتیک و مهندسی الکترونیک رشته های چند وجهی هستند که نیاز به صبر و زمان دارند. به این ترتیب، باید برای تحقیق در مورد مواد و ابزارهایی که برای پروژه های خود نیاز دارید، وقت بگذارید. در این راهنما به انواع چرخ های ربات و مشخصات آن ها پرداختیم.
“لطفاً سوالات خود را با ذکر عنوان مقاله ارسال کنید؛ تیم خانه رباتیک ایران در کنار شماست.”
آماده سازی فرم
لطفا صبر کنید
فرم ساز آسان
شعبه ساری: خیابان مهدیه، نبش بهمن شرقی
شعبه بابل: پل کارگر به سمت کشوری، روبروی ماکروویو، جنب فروشگاه جانبو
شعبه قائم شهر: خیابان ساری، بین یاس ۲۰ و ۲۲